IALAB
- Professori:
- Roberto Micalizio
Prolog
- esecuzione mediante backward chaining in profondità (riguardo l’esplorazione dell’albero)
- si parte dal goal da derivare
- il goal è congiunzione di formule atomiche
- \(G_1,G_2,\dots,G_n\)
- dimostrazione mediante risoluzione che il goal segue dal programma
- il goal è congiunzione di formule atomiche
- regola \(A:- B_1,B_2,\dots,B_m\) applicabile a \(G_i\) se
- le variabili vengono rinominate
- \(A\) e \(G_i\) unificano, l’interprete prolog fa pattern matching sulla testa della regola
- Most General Unifier (
MGU)- fa il minimo numero di instanziazioni per unificare
- \(\sigma = \{X/Y\}\) ad esempio
Formulazione non deterministica dell’interprete:
interprete(G):
if G vuoto
then successo
else sia G = G1,G2,...,GN
sia R insieme delle clausole applicabili a G_1
if R vuoto
then fallimento
else scegliere clausola A :- B1,B2,...,BM in R
sia sigma il MGU di G1 di A
inteprete(B1sigma,B2sigma,...,BMsigma,G2sigma,...,GNsigma)
Prolog la rende deterministica scegliendo le clausole in ordine di scrittura del programma, in caso di fallimento continua con il backtracking a cercare una soluzione.
Prolog implementa un metodo di prova corretto e completo
- la risoluzione
SLD- parte sempre dal goal e una (la prima) clausola che unifica
- ogni passo fa risoluzione tra la risolvente (risultato del passo prima) e una delle clausole iniziali
- corretta e completa se si limita alle clausole di horn, disgiunzioni con al più un letterale positivo
- quindi procede in profondità e da sinistra verso destra
La struttura dati fondamentale in pl è la lista:
- testa
- coda
?- [Head|Tail]=[mario,23,[2,3],antonio,luigi,[]].
Head = mario,
Tail = [23,[2,3],antonio,luigi,[]].
Operazioni importanti:
- caricamento di un file
['file.pl'] - per stampare la totalità di una lista si usa
write(). length(List, N)- commenti con carattere
% - assegnamento con la keyword
is append(List,List,Res)member(E,List)
?- length([1,2,3],N).
N = 3.
?- length([1,2,3],3).
true.
Run-time dell’interprete
Concettualmente 2 stack:
- stack di esecuzione
- stack di backtracking
- contiene choise-points
- il predicato di cut
!rimuove il contenuto di questo stack per l’esecuzione corrente, rendendo definitive le scelte fatte fino a quel momento, rimuove rami dell’alberoSLDa :- p,!,b.- quando viene raggiunto rimuove i punti di scelta per
a, p
- quando viene raggiunto rimuove i punti di scelta per
- si perde la completezza del
SLD
Liste
% somma(L,R)
somma([],0).
somma([Head|Tail],Res):-
somma(Tail,RTail),
Res is Head+RTail.
% conta(L,X,N)
conta([],_,0).
conta([X|Tail],X,Res):-
conta(Tail,X,RTail),
Res is 1+RTail.
conta([H|Tail],X,Res):-
H \== X,
conta(Tail,X,Res).
% soluzione molto inefficiente
% deve scorrere ogni passo ricorsivo la lista per
% fare la append
invert([],[]).
invert([H|T],Inv):-
invert(T,TInv),
append(TInv,[H],Inv).
% invopt(L,[],R)
invopt([],Temp,Temp).
invopt([H|T],Temp,R):-
invopt(T,[H|Temp],R).
inv(L,R):-invopt(L,[],R).
Esercizi sugli insiemi:
union([],B,B).
union([X|T],B,R):-
member(X,B),
union(T,B,R).
union([X|T],B,[X|R]):-
\+member(X,B),
union(T,B,R).
La negazione in prolog non è la negazione classica, proprio perché gestisce solo clausole di horn (al più un letterale non negato).
\+A- negazione per fallimento
- negation by failure
- definizione puramente operazionale, predicato extra-logico
prologprova a dimostrare l’asserzione, se ci riesce restituiscefalse,truese fallisce- ci sono 3 possibili esiti, anche il loop
- l’albero
SLDnon termina
- l’albero
Altro goal extra-logico è il cut, sintatticamente il !.
- rende definitive le alternative fino a quel momento
- permette la mutua esclusione
- impedisce il backtracking verso altre clausole
- permette l’implementazione del
if-else - controlla l’esecuzione dell’interprete
- predicato sempre vero
- si perde la completezza
countPos([],0).
countPos([H|T],R):-
X > 0,!,
contaPos(T,N),
R is N+1.
countPos([_|T],R):-
countPos(T,R).
choose(X,L):-
member(X,L),!.
Ricerca nello Spazio degli Stati
- stato iniziale
- obiettivi (
goal) - insieme della azioni
- passaggio da uno stato all’altro
- costi delle azioni
A partire da questi si definiscono cammini e i loro costi associati. In questi problemi il grafo non è disponibile fin dall’inizio, anche se fosse disponibile le dimensioni di questo grafo sono esponenziali e non esplorabili completamente in tempo ragionevole.
Dobbiamo definire delle euristiche per scegliere ad ogni passo l’azione da eseguire
- tentare di focalizzare la ricerca
- solo una parte dello spazio degli stati va esplorato, cercando i più promettenti
In prolog:
-
applicabile(AZ,S) -
trasforma(AZ,S1,S2) -
iniziale(S) -
finale(S) -
ricerca in ampiezza garantisce l’ottimalità
- esponenziale in spazialità, mantiene tutti gli stati in memoria
-
ricerca in profondità
- efficiente
- non garantisce l’ottimalità
-
iterative deepening
- ricerca in profondità iterativamente a profondità sempre maggiori
- garantisce l’ottimalità
Esistono strategie informate:
- utilizzando informazioni addizionali si può informare la scelta con euristiche
h(n)costo stimato del cammino ottimo dal nodonalgoal- l’euristica
hnon è un oracolo, può sbagliare
- l’euristica
g(n)costo del cammino trovato dal noto iniziale al nodon
Labirinto
- cammino in una griglia rettangolare
- azioni, movimento nelle direzioni cardinali
labyrint.pl- fotografia della realtà, fatti
actions.pl- possibile euristica per una strategia informata è la distanza di manhattan
ID-A*, profondità iterative-deepeningA*, ampiezza
Answer Set Programming
- War of Semantics, 80s-90s
- prove per dare una semantica alla negazione per fallimento
- nasce linguaggio simile a
prologma con funzionamento completamente diverso- per problemi di soddisfacimento di vincoli, planning
- problemi combinatori
- non goal directed
- soluzioni sono i modelli (answer set), non le prove
- inferenza non basata su backward chaining ma sulla costruzione di modelli stabili
CLINGO,Cmodels
- per problemi di soddisfacimento di vincoli, planning
- in
ASPc’è anche la negazione classica (forte)notnegazione per fallimento-negazione classica- zucchero sintattico, definibile un letterale opposto dell’altro tramite integrity constraint
- integrity constraint
- regole senza testa
- non devono valere
- si applica a programmi logici proposizionali
- solo proposizioni, nessuna variabile
- le variabili sono utilizzate solo come strumento per la scrittura
- il programma non descrive una computazione
- non può andare in loop
- l’ordine dei letterali non ha importanza
Semantica
- il solver costruisce uno (o più) Answer Set
- modello minimale
- è unico se non c’è negazione per fallimento
- ridotto
- un altro programma
ASP - \(P^S\)
- ridotto del programma \(P\) rispetto l’insieme di atomi \(S\)
- rimuovi ogni regola il cui corpo contiene
not L, perL in S - rimuovi tutti i
not Ldai corpi delle restanti regole
- il ridotto non contiene atomi con negazioni per fallimento per costruzione
- ha un unico answer set
- se tale answer set coincide con
Sallora questo è un answer set accettabile
- l’insieme dei possibili answer set (qui non conta la minimalità) dei ridotti è la soluzione del problema, l’insieme dei modelli
- un altro programma
Esempi ASP
gatto(tom).
gatto(silvestro).
miagola(X):-gatto(X).
bird(tweety).
penguin(tux).
ostrich(pippo).
bird(X):-penguin(X).
bird(X):-ostrich(X).
-fly(X):-penguin(X).
-fly(X):-ostrich(X).
fly(X):-bird(X),not -fly(X).
pacifist(X):-quacker(X),not -pacifist(X).
-pacifist(X):-republican(X),not pacifist(X).
republican(nixon).
quacker(nixon).
member(anna).
member(nicolo).
member(lautaro).
member(chiara).
job(1..7).
1 {assign(X,J):job(J)} 3:-member(X).
1 {assign(X,J):job(J)} 3:-member(X).
1 {assign(X,J):member(X)} :-job(J).
:-assign(X,2),assign(X,7),member(X).
#show assign/2.
Esempio di insoddisfacibilità:
- questa base di conoscenza è soddisfacibile con l’insieme vuoto se non ci sono pinguini
fly(X):-bird(X).
bird(X):-penguin(X).
-fly(X):-penguin(X).
penguin(tux).
Planning
Planning in the art and practice of thinking before acting. – Patrik Haslum
Selecting a goal-leading course of action based on a high-level description of the world. – Jorg Hoffmann
Un planning è definito da:
STS- un piano
- un goal
- può essere una proprietà locale o globale del mondo
Un piano può essere eseguito semplicemente da un controller oppure in ottica di continual planning il planner viene ricontattato in caso di modifiche nell’ambiente.
State Transition System
STS
- Stati \(S\)
- Azioni \(A\)
- Eventi \(E\)
- relazioni \(\gamma\) di transizione di stato
- insieme delle parti \(2^S\)
- una azione può essere non deterministica e portare in stati diversi
Classical Planning
Assunzioni:
- dominio finito
- numero finito di stati
- in caso contrario non c’è più garanzia di terminazione del planning
- completa osservabilità
- funzione \(\eta: S \to O\) è l’identità
- dominio deterministico
- dominio statico
- l’ambiente non interferisce con l’agire dell’agente
- \(E=\emptyset\)
- goal semplici
- piani sequenziali
- azioni linearmente ordinate
- una sola azione per volta è possibile
- tempo implicito
- azioni ed eventi hanno durata istantanea
- singolo agente
- un solo planner e un solo controller
Ognuna di queste assunzioni può essere rilassata in applicazioni reali. Il problema di pianificazione è computazionalmente costoso ricorrendo a due problemi decisionali:
- PlanSAT
- Bounded PlanSAT, rimane decidibile limitando lo spazio di ricerca
Questi sono PSPACE, in molti casi pratici Bounded PlanSAT è NP-complete mentre PlanSAT è P.
Le proprietà ricercate in un algoritmo di pianificazione sono:
- correttezza
- completezza
- ottimalità
Algoritmi di Pianificazione nello Spazio degli Stati
STRIPS
STanford Research Institute Problem Solver
- Fikes, Nilsson 1971
- introduce rappresentazione esplicita degli operatori di pianificazione
- gestisce il frame problem
- idee fondamentali
- linear planning
- means-end analysis
Linear Planning:
- risolvere un goal alla volta (devono essere indipendenti per raggiungere un piano ottimo)
- Sussmann’s Anomaly
- stack dei goal
Means-End Analysis:
- considera solo aspetti rilevanti al problema (ragiona backward tramite regressione)
Il linguaggio utilizzato è un sottoinsieme della FOL, simboli di predicati finiti, simboli di costanti
- uno stato è una congiunzione di atomi ground (privi di simboli di funzione)
Relazioni:
- fluenti
- possono apparire come effetti di azioni
- persistenti
Plan Operators (template):
- tripla: nome, precondizione, effetto
- name
- precond detona i letterali (positivi e negativi)
- effects rappresenta gli effetti delle azioni (solo su letterali bounded nelle precondizioni)
- effects+ add-list
- effects- delete-list
Pick_BLock(?b, ?c)
Pre: Block(?b), HandEmpty, Clear(?b), On(?b, ?c), Block(?c)
Eff: Holding(?b), Clear(?c), not HandEmpty, not On(?b, ?c)
Algoritmo:
STRIPS (initState, goals)
state = initState; plan = []; stack = []
Push goals on stack
Repeat until stack is empty
If top of stack is a goal g satisfied in state:
pop stack
Else If top of stack is a conjunctive goal g:
Select an ordering for the subgoals of g
push them on stack
Else If top of stack is a simple goal sg:
Choose an operator o whose effect+ matches goal sg
Replace goal sg with o
Push the preconditions of o on stack
Else If top of stack is an operator o:
state = apply(o, state)
plan = [plan; o]
- primo
Else Ifè il passo di linearizzazione del goal complesso - sostituire
gcon l’operatore e le sue precondizioni è il passo di regressione- means-end
Due concetti utilizzati da questo algoritmo:
- progressione, considerando gli effetti e aggiungendoli allo stato progredendo
- regressione, considerando le precondizioni e aggiungendole allo stato regredendo
Il linear planning:
- subottimo
- interdipendenza dei sotto-goal
- ordinamento sfavorevole dei goal
CSP
- formulare un problema di pianificazione come un problema di soddisfacimento dei vincoli
- consente di ritardare delle decisioni fino al momento strettamente necessario
- il modello viene espresso in variabili di stato e non più
FOL- insieme degli oggetti rilevanti che si vogliono modellare
- due proprietà per gli oggetti
- rigid, invarianti
- atomi ground nella rappresentazione classica
- costanti booleane con variabili
- varying
- relazioni fluenti nella rappresentazione classica
- variabili cui viene assegnato un valore
- hanno un dominio
- rigid, invarianti
- le due rappresentazioni sono equivalenti (riconducibili una con l’altra) ma:
- state-variable
- sintetica e uniforme
- ogni stato definito sulle stesse variabili
- si presta ad estensioni verso il non-classical planning
- osservabilità parziale
- euristiche
- sintetica e uniforme
- state-variable
- principio:
- Least Commitment
- fare scelte solo quando indispensabili alla risoluzione di una parte di problema
- non porre più vincoli del necessario
- ordinamenti e binding sono ritardabili
Least-Commitment Planning - PSP
-
ricerca spazio dei piani (
PSP) -
ogni nodo della ricerca è un piano parzialmente ordinato con flaws
-
ogni passo si rimuove un flaw con raffinamenti incrementali
-
l’algoritmo termina con successo con un piano
- completamente istanziato
- parzialmente ordinato
-
piano:
- tupla \(\langle A,O,B,L \rangle\)
- azioni
- vincoli di ordinamento (r. d’ordine parziale)
- bindings (vincoli)
- causal links (precondizioni/effetti delle azioni)
- tupla \(\langle A,O,B,L \rangle\)
-
procedimento per open goals
- goal senza un link causale a supporto della precondizione
- si trova un’azione a supporto (nel piano o la si aggiunge)
- la precondizione può appartenere ai suoi effetti
- può precedere il goal
- instanziazione least-commitment
- add vincolo di precedenza \(a \prec b\)
- add causal link \(a \to^p b\)
-
threats (o clobber)
- una azione \(c\) minaccia il link \(l\)
- può modificale il valore di verità di \(p\) e può posizionarsi tra \(a\) e \(b\), oppure
- può produrre \(p\), \(l\) impone che sia prodotto da \(a\)
- risoluzione:
- promotion, \(c \prec a\)
- demotion, \(b\prec c\)
- separation, vincolo di non-codesignation
- in modo che l’effetto di \(c\) non unifichi con \(p\)
- una azione \(c\) minaccia il link \(l\)
PSP:
- corretto e completo
- le azioni non strettamente sequenziali possono essere parallelizzate
Graphplan
- struttura dati utile a
- definire euristiche domain-dependant
- non dà garanzia sulla raggiungibilità ma dà una buona stima di distanza
- generare un piano
- astrae lo spazio di ricerca
- algoritmo polinomiale per costruirlo
- definire euristiche domain-dependant
- grafo orientato, aciclico, ordinato a livelli
- livello iniziale S0 letterali che valgono nello stato iniziali
- un nodo per fluente
- livello di azioni che sono applicabili agli stati del livello precedente
- un nodo per azione
- \(S_i, A_i\) si alternano fino a una condizione di terminazione
- livello iniziale S0 letterali che valgono nello stato iniziali
Considerazioni:
- rappresentazione logica
GPtraccia un sottoinsieme delle possibili interazioni negative- un letterale che appare in un \(S_i\) potrebbe essere producibile solo successivamente
- comunque una buona stima
- polinomiale
- \(S_i\) è un belief state
- un letterale che appare in un \(S_i\) potrebbe essere producibile solo successivamente
- un letterale può essere sia precondizione o atomo persistente
- la persistenza viene implementata ma un’azione
no-op
- la persistenza viene implementata ma un’azione
- ogni livello possono esserci link di mutua esclusione tra letterali/azioni
GPcresce monotonicamente, prima o poi livella e stati consecutivi sono identici
Complessità:
- \(O(n(a+l)^2)\)
Proprietà di graphplan:
- corretto e completo
- è un Partial-Order Planner (
POP), comePSP- azioni allo stesso livello possono essere parallelizzate
- qualunque linearizzazione delle azioni che rispetta i vincoli di ordinamento è una possibile soluzione classica
Mutua Esclusione
Tra azioni:
- effetti inconsistenti
- un azione nega affetti dell’altra
- interferenza
- uno degli effetti di un’azione è negazione di una precondizione dell’altra
- competizione delle precondizioni
- una delle precondizioni di un’azione è mutualmente esclusiva con le precondizioni dell’altra
Teorema:
Se esiste un piano valido allora questo è un sottografo del grafo di pianificazione.
Tra letterali:
- complementarity
- uno negazione dell’altro
- inconsistent support
- se ogni possibile coppia di azioni al livello precedente che producono i letterali è mutualmente esclusiva
Euristiche
- singolo letterale
- profondità a cui compare per la prima volta
- lunghezza del piano serializzato estratto dal
GP
- congiunzione di letterali
- max-level
- primo livello in cui compaiono tutti
- somma dei livelli
- assume l’indipendenza dei letterali del goal, non ammissibile
- livello di insieme
- livello in cui compaiono senza che alcuna sua coppia sia in mutex
- ammissibile, ignora le dipendenze tra tre o più letterali
- max-level
Algoritmo
- espandi fino al livello in cui gli atomi del goal compaiono tutti e non in mutua esclusione tra loro
- invoca
Extract-Solutioncercando un piano all’interno del grafo- se trova una soluzione termina, altrimenti continua
- espandi il grafo ancora e torna a
1.
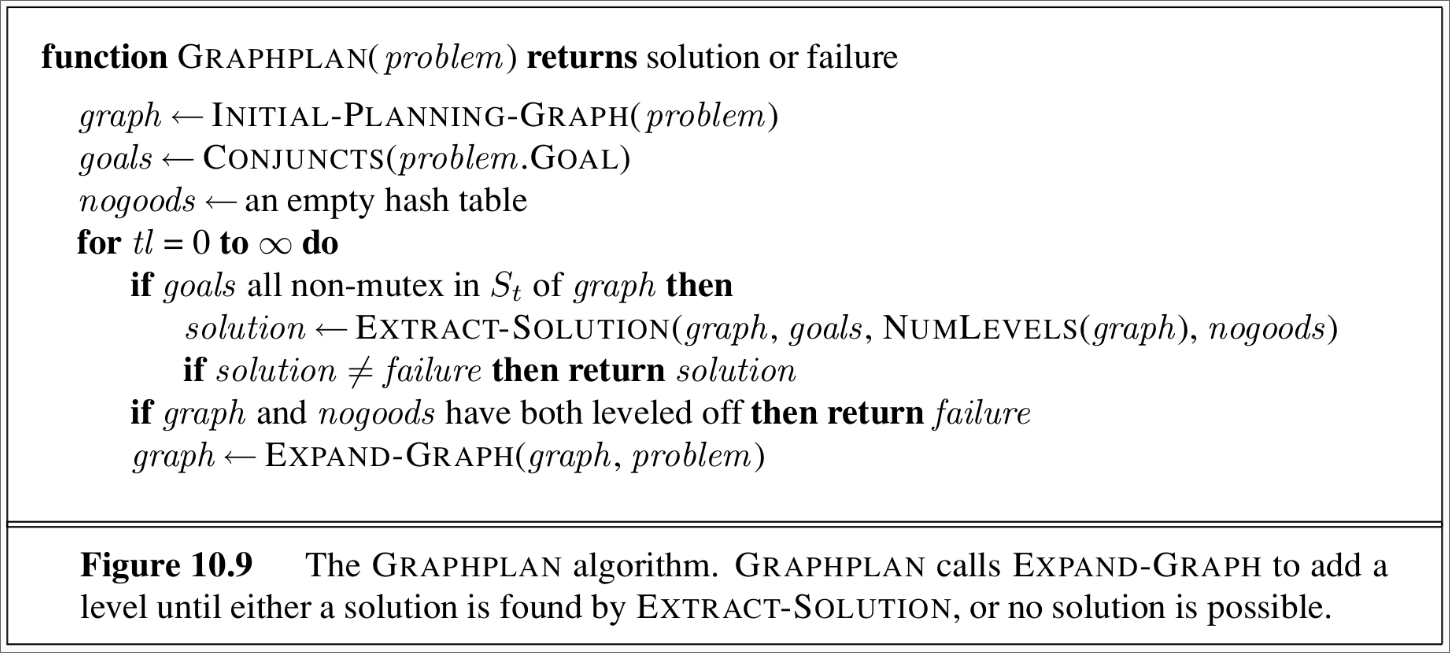
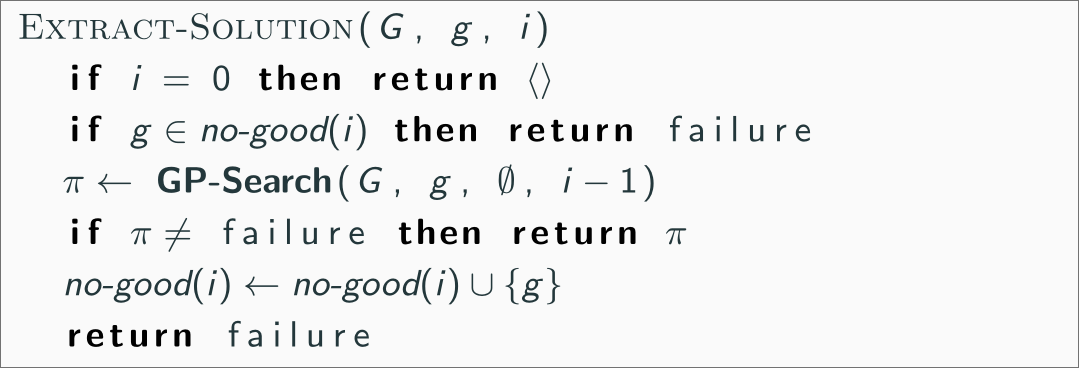
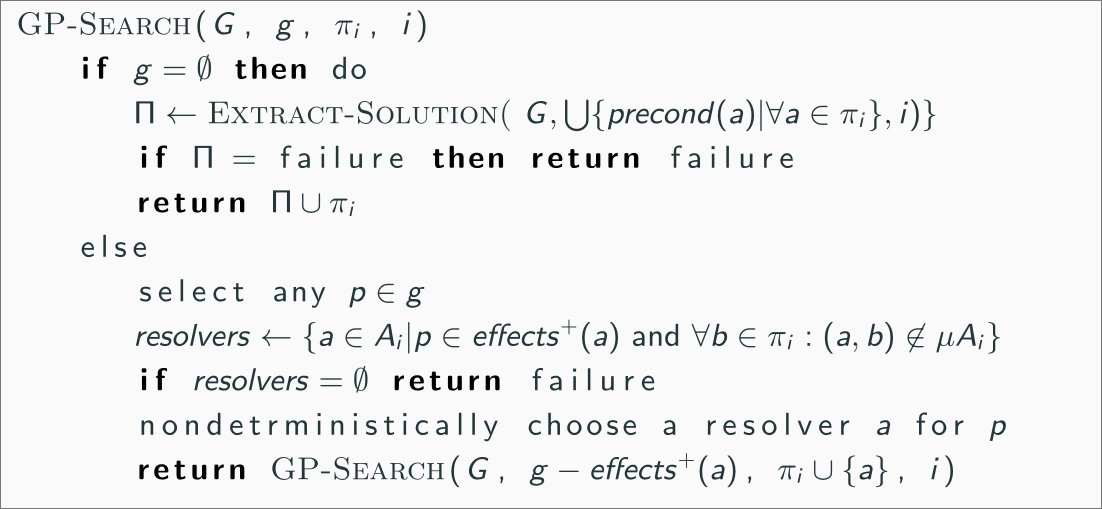
-
Extract-SolutioneGP-Searchsono mutualmente ricorsive
Terminazione
- letterali crescono monotonicamente
- azioni crescono m.
- rel. di mutex decrescono m.
- no-goods decrescono m.
- date le due proprietà precedenti
Dimostrazione:
- dato che azioni e letterali crescono m. e sono insiemi finiti, deve esistere un livello in cui l’insieme dei letterali è uguali a quello del livello precedente
- poiché mutex e no-good decrescono m. e non possono essere meno di zero, deve esistere un livello con lo stesso numero di mutex e no-good del precedente
- una volta che il grafo raggiunge la situazione di livellamento di livelli e no-good, se uno dei letterali del goal è mancante o mutex con un altro, allora si può concludere che non esiste soluzione
Euristiche
- utilizzate per focalizzare la ricerca
- stima la bontà di una scelta
- progression e regression
- definite a partire da un problema rilassato e risolto
Esempi:
- Spazio degli stati: Ricerca in avanti
- non ammissibile, complessa
- Spazio degli stati: Ricerca all’indietro
- non ammissibile, ma pre-compilabile e quindi semplifica runtime
- Spazio dei piani: Ricerca AND/OR
- Fewer Alternatives First (
FAF)- preferisce il flaw con minor numero di resolver
- più facile scoprire se flaw non risolvibile
- Fewer Alternatives First (
Hierarchical Task Networks
- Turing-completo
- NP-completo